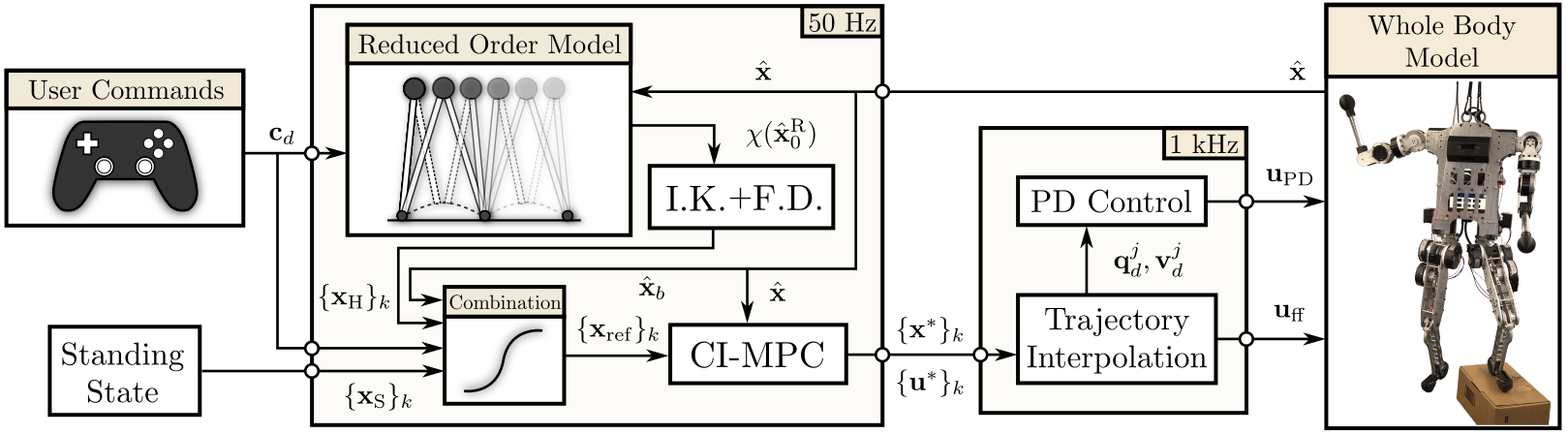
Humanoid robots have great potential for real-world applications due to their ability to operate in environments built for humans, but their deployment is hindered by the challenge of controlling their underlying high-dimensional nonlinear hybrid dynamics. While reduced-order models like the Hybrid Linear Inverted Pendulum (HLIP) are simple and computationally efficient, they lose whole-body expressiveness. Meanwhile, recent advances in Contact-Implicit Model Predictive Control (CI-MPC) enable robots to plan through multiple hybrid contact modes, but remain vulnerable to local minima and require significant tuning. We propose a control framework that combines the strengths of HLIP and CI-MPC. The reduced-order model generates a nominal gait, while CI-MPC manages the whole-body dynamics and modifies the contact schedule as needed. We demonstrate the effectiveness of this approach in simulation with a novel 24 degree-of-freedom humanoid robot: Achilles. Our proposed framework achieves rough terrain walking, disturbance recovery, robustness under model and state uncertainty, and allows the robot to interact with obstacles in the environment, all while running online in real-time at 50 Hz.